It's all in the timing
 I have to admit that despite my fascination with modern technologies, the art of being a racing driver was always encompassed in the skill of changing gear - the crispness of the up change and the shear poetry of it while simultaneously braking and changing down. Judging it to perfection was satisfaction indeed, and many more hours were spent practising either on the road to and from my place of work or in the 'cockpit' of an armchair at home.
I have to admit that despite my fascination with modern technologies, the art of being a racing driver was always encompassed in the skill of changing gear - the crispness of the up change and the shear poetry of it while simultaneously braking and changing down. Judging it to perfection was satisfaction indeed, and many more hours were spent practising either on the road to and from my place of work or in the 'cockpit' of an armchair at home.
But despite these many hours of practice I doubt very much that while much personal satisfaction was obtained, the change itself would have been far from ideal. Little wonder then that in a world of iPods and Apps, the art - or should I say now, the technology - of changing gear has been taken over by yet another onboard ECU. But as I have discovered only recently, not all that is electronic is necessarily the best and that, very much like a stand-up comedian, it's all in the timing.
But while the difficulties of synchronising input and output speeds on the traditional H-type gearbox were simple once mastered, the complexity of ensuring the perfect change, time after time, really does take some form of electronic brain. Because not only do the shaft speeds have to be equalised in order for the change to take place, all this has to be coordinated with the engine management system and the selector mechanism inside the box, with the whole process producing the minimum of shock loading and in the minimum amount of time.
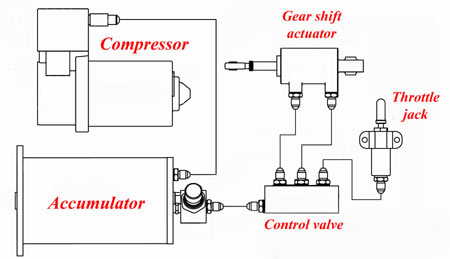
Although motorcycles tend to incorporate manual selection systems inside their sequential gearbox assemblies, the forces necessary to generate rapid movement of the selector forks within will often require more force than most people can manage inside the confines of a racecar. For that reason, gear-change actuator mechanisms, as well as that required to 'blip' the throttle on downshifts, generally need to be electrical, pneumatic or hydraulic. While professionals often prefer the more expensive hydraulic approach, and electric solenoid technology can be used, the most popular method - because of its simplicity and ruggedness - is to use pneumatics. At only modest pressures (8-10 bar), pneumatics can produce surprisingly high forces for very little overall weight which, and unlike solenoid technology, do not fall away with temperature and any fall in battery voltage due to repetitive use.
But the secret of any successful system is how it handles the ignition 'cut' facility. Designed to unload the gear dogs of a straight-cut box by cutting the engine sparks momentarily, these units are generally described as having a 'flat shift' capability that enables gear changing 'up' the box at the same time as keeping the throttle wide open. Taking its signal to cut the sparks from a switched input, a gear lever or steering wheel paddle arrangement, the ignition is cut for a predetermined time before being re-introduced at a variable time, 50 ms or 100 ms later.
In operation, once the ignition-cut signal is given, the driveline has to unwind sufficiently to allow the drive dogs to disengage and the forks to move across to engage the next gear before the sparks can be resumed. In open-loop mode, the time taken for this has to be estimated and, if too long, the engine speed may have dropped too much, resulting in unnecessary shock loading as well as loss of time. If the time allowed is too short a failed gear change will result.
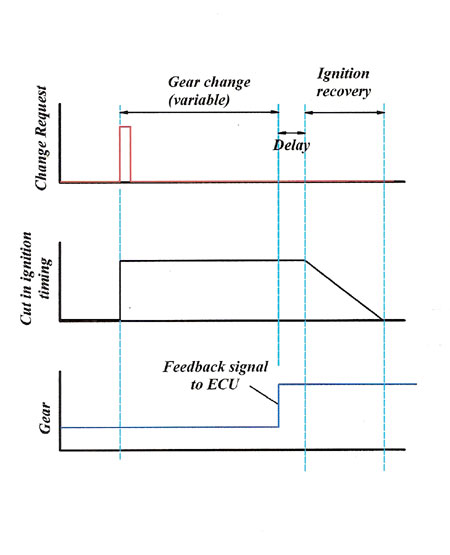
Either way, unnecessary damage to engine or driveline could result. The greater the transmitted torque, the greater this transmission wind-up, and thus the only way to minimise these mis-shifts, is to allow for a longer delay. In closed-loop mode, the sparks will remain cut until the gear has been fully selected, indicated by some form of position indicator - on say, the barrel of a sequential box - after which the ignition can be ramped back in again. With this delay varying according to the driveline wind-up and drive dog arrangement, every shift can be timed to perfection with the minimum of interruption of torque to the wheels.
But, surprisingly, the speed of change may not be very much faster than my manual changes. It's just that they are optimally the same time after time - unlike of course, yours truly, with his manual gearbox, who tires rather easily after the first few laps.
Fig. 1 - Schematic of a pneumatic gear shift system
Fig. 2 - Closed-loop control when the encoder on the gearbox confirms selection of the next gear
Written by John Coxon