Active dynos
 In the past, most engine development work would take place on passive dynamometers, which allowed only for steady-state power runs to ascertain basic power and torque curves. The advent of computer-controlled 'active' dynos however has revolutionised the way engine development programmes are run, presenting engineers with a plethora of new tools to understand engine characteristics.
In the past, most engine development work would take place on passive dynamometers, which allowed only for steady-state power runs to ascertain basic power and torque curves. The advent of computer-controlled 'active' dynos however has revolutionised the way engine development programmes are run, presenting engineers with a plethora of new tools to understand engine characteristics.
A passive dyno usually consists of a power absorber - a water brake, hydraulic brake or eddy current brake - and a control system that varies the resistance of the absorber to match the engine's torque output, or in some instances allows for a pre-programmed acceleration rate. An active dyno system, on the other hand, allows for a far wider range of drive situations to be simulated, incorporating data collected from circuits under race conditions.
The absorber on an active dyno normally uses a permanent magnet motor-generator, operated by a fully programmable computer control unit. This control allows for three different types of operating mode:
• Basic power measurement - where the dyno acts like a passive unit to measure engine torque.
• Transient loss testing - achieved by driving the engine and measuring the input torque required.
• Drive cycle testing - a combination of power measurement and loss testing to simulate 'real world' running conditions.
This third mode of operation is the most useful to development engineers, allowing for accurate simulation of engine loads under race conditions. Data collected during the running of the car can be transferred to the dyno controller, and specific scenarios can be run through without the logistics and expense of actually putting a car on track. This technology has been widely adapted by many top-level motorsport outfits, from NASCAR to Formula One.
Taking NASCAR as an example, each circuit places a unique set of demands on the engine. At one extreme is Talladega Super Speedway, a 2.66-mile oval where running is primarily at full throttle, with the engine operating in a narrow band of around 300 rpm, with engine speed being dictated by the deceleration caused by cornering forces. In contrast to this, the 0.55-mile oval at Martinsville sees the engine running at anything from 5800 rpm to 9500 rpm, with heavy braking events for corners. Road courses place an even wider range of demands on the engine, from short sharp rises in rpm to prolonged pulls from low revs on exiting slow corners.
An active dyno can simulate all of these conditions, so long as data on throttle position, rates of engine acceleration and deceleration and shifting/braking points is inputted. From this data, the controller can apply the correct throttle openings at the right time, while providing sufficient resistance to represent the mass of the vehicle and aerodynamic forces acting on it. The load can also be rapidly changed to represent full-throttle shifting and load spikes encountered upon clutch release, or accelerate the engine with the throttle closed, as would happen during a downshift.
In recent years several key advances have allowed for more accurate drive cycle testing using active dynamometers, some of which have also resulted in unforeseen cost benefits for teams and manufacturers. First, improvements in computing power have vastly increased the capabilities of closed-loop control systems, with data systems capable of logging more channels of information at ever increasing rates. The parameters for closed-loop control can consist of - but are not limited to - throttle position, engine speed, engine torque, manifold absolute pressure (MAP), manifold vacuum.
Additionally, the latest systems have user-definable parameters that allow the engineer to add almost any control input they can think of. This means that more data collected from track testing and wind tunnel programmes, which have also seen an increase in density of data gathered, can be incorporated into engine simulation scenarios.
The second key advance has been the development of high-speed drive motors, capable of exceptionally fine and rapid speed adjustment. Similar to the benefits of higher data sampling rates, this new generation of motors allow for a more accurate replication of engine load scenarios and hence greater correlation between on-track and test cell results. Unrelated to track performance, motor development has also resulted in potential cost savings for operators, with some manufacturers now offering regenerative motor systems that use the power absorbed by the dynamometer to generate electricity that can be returned to the grid. Given that many systems can have electric motors rated up to 1200 hp, which consume prodigious amounts of power, any potential offsetting of energy costs is a welcome benefit.
The overall result for engineers is a far deeper understanding of an engine's traits, combining the benefits of on-track testing and the demands this places on a motor, with the accuracy of operating in a controlled environment. The one thing that is not present is the g-loads seen by a car on track; however, test beds are available to simulate such conditions, but that is another story altogether.
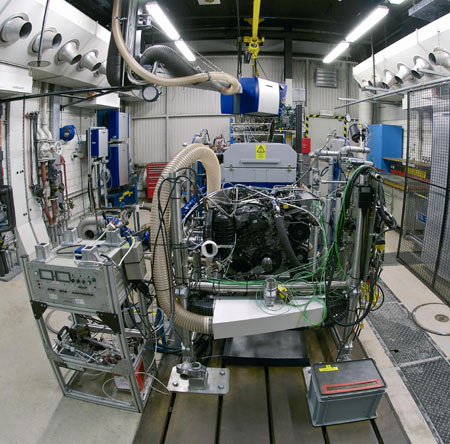
Fig. 1 - This overview of a dyno test cell shows the volume of equipment and sensors needed to assess the performance of a modern engine accurately (Courtesy of Delphi)
Written by Lawrence Butcher