Electronically controlled differentials
Developed at the dawn of the motor car, the driveline differential was designed to allow the driven wheels to rotate at different speeds but still apply torque to the driving wheels. While not essential when travelling in a straight line, when traversing a curve where (assuming no tyre slip) the driven wheels are rotating at different speeds, the absence of one can give the vehicle undesirable handling characteristics. Delivering an equal torque to each of the driven wheels, the torque to each wheel will be limited to the one with the least traction – which, in terms of outright performance, is unacceptable to racers and rallyists alike. To combat this phenomenon, limited slip differentials (LSDs) were developed.
In practical terms there are two types of LSD, often referred to as ‘passive’. Torque-sensitive differentials bias the torque across the axle as a function of the torque available at the slipping wheel. Having a fixed bias ratio, the torque sent to the non-slipping wheel will be a fixed ratio of that at the slipping wheel. However, if the slipping wheel is in the air, for instance if it’s bouncing off a kerb, then all traction is lost, and along with it any forward mobility. To offset this a certain amount of pre-load can be introduced, but so as not to affect vehicle handling this has to be limited [Fig. 1].
The other type of passive method is the speed-sensitive system. Biasing a fixed amount of torque proportional to the speed difference across the driving wheels, these have to be ‘tuned’ to the specific requirement of each vehicle, with inevitable compromises depending on the requirement for either good vehicle handling or excellent forward mobility [Fig. 2]. Furthermore, when a vehicle travels through a curve that normally produces a difference in wheel speeds, some level of undesirable torque transfer will also take place, regardless of the external conditions or traction available at the track surface.
Since both these systems have undesirable limitations, optimal vehicle handling can only be attained when the differential is electronically controlled, at which point the differential can be said to be ‘actively’ controlled.
Consisting of a gerotor-style hydraulic pump that spins when a speed difference between wheels is detected, fluid is drawn out of an accumulator to pressurise a hydraulic system and actuate the operating mechanism of a multi-plate clutch pack in the driveline to one of the driving wheels (on a two-wheel drive system). The hydraulic pressure (and hence the operation of the clutch) is then modulated by some kind of solenoid-controlled spool valve from the pulse width modulated (PWM) signal of an electronic controller (ECU) according to various inputs such as individual wheel speeds, steering angle, throttle position and vehicle speed.
For much of the time the system will need to operate as an open differential since neither of the wheels will be traction-limited, but with increasing speed and load transfer, torque will need to be transferred back to the inside wheel. For low-speed corners, where the wheel speed difference is high, the torque transfer should not be so great, since the vehicle could be plunged into terminal understeer. So, rather than the compromised settings of a passive differential, the highly ‘tuneable’ active version gives just that bit more scope for performance enhancement.
With an ECU for the engine, one for the gearbox and another for the differential, electronic control just got that little bit more complex.
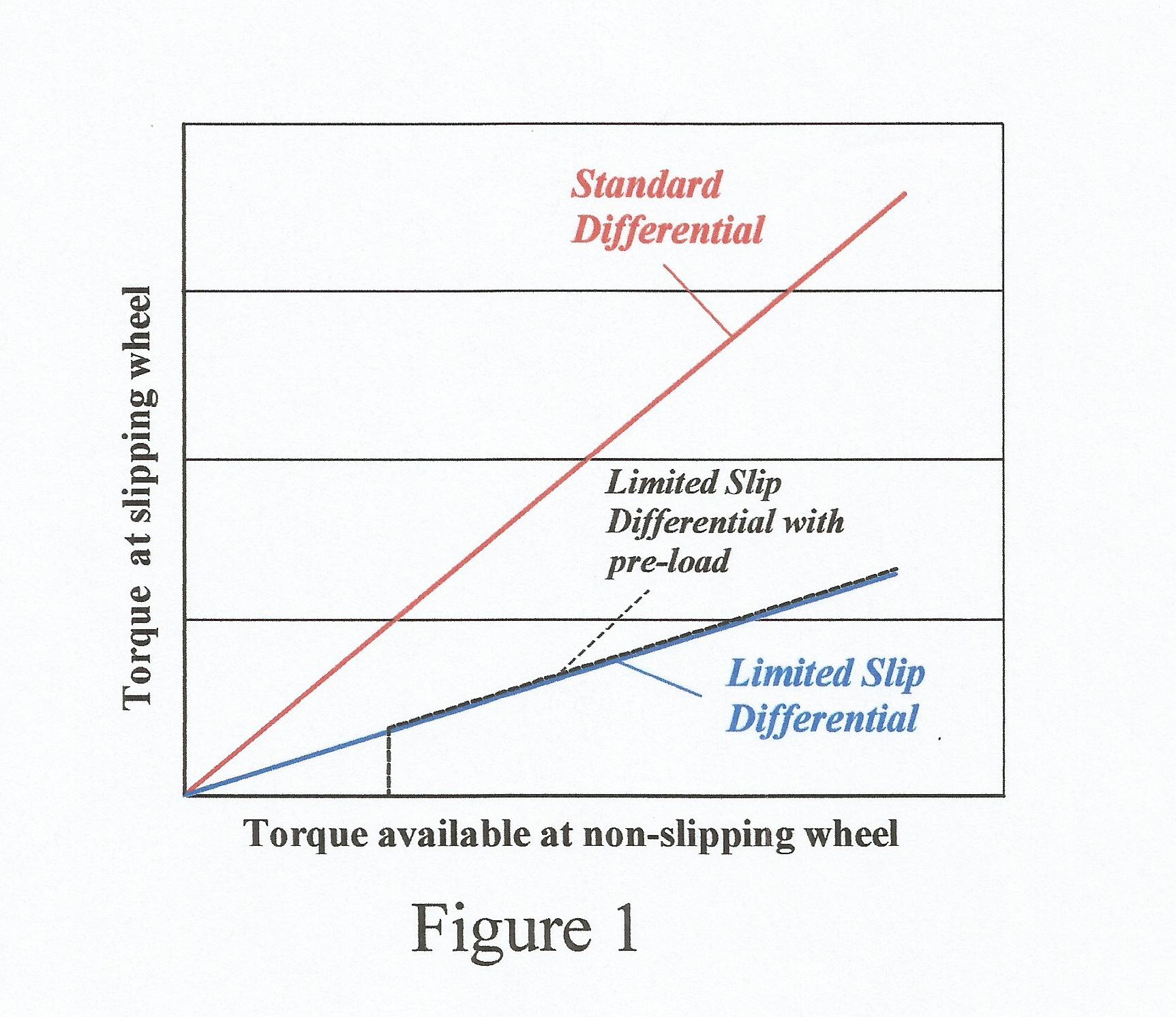 Fig. 1 - Traction effort for torque-sensitive limited slip differentials
Fig. 1 - Traction effort for torque-sensitive limited slip differentials
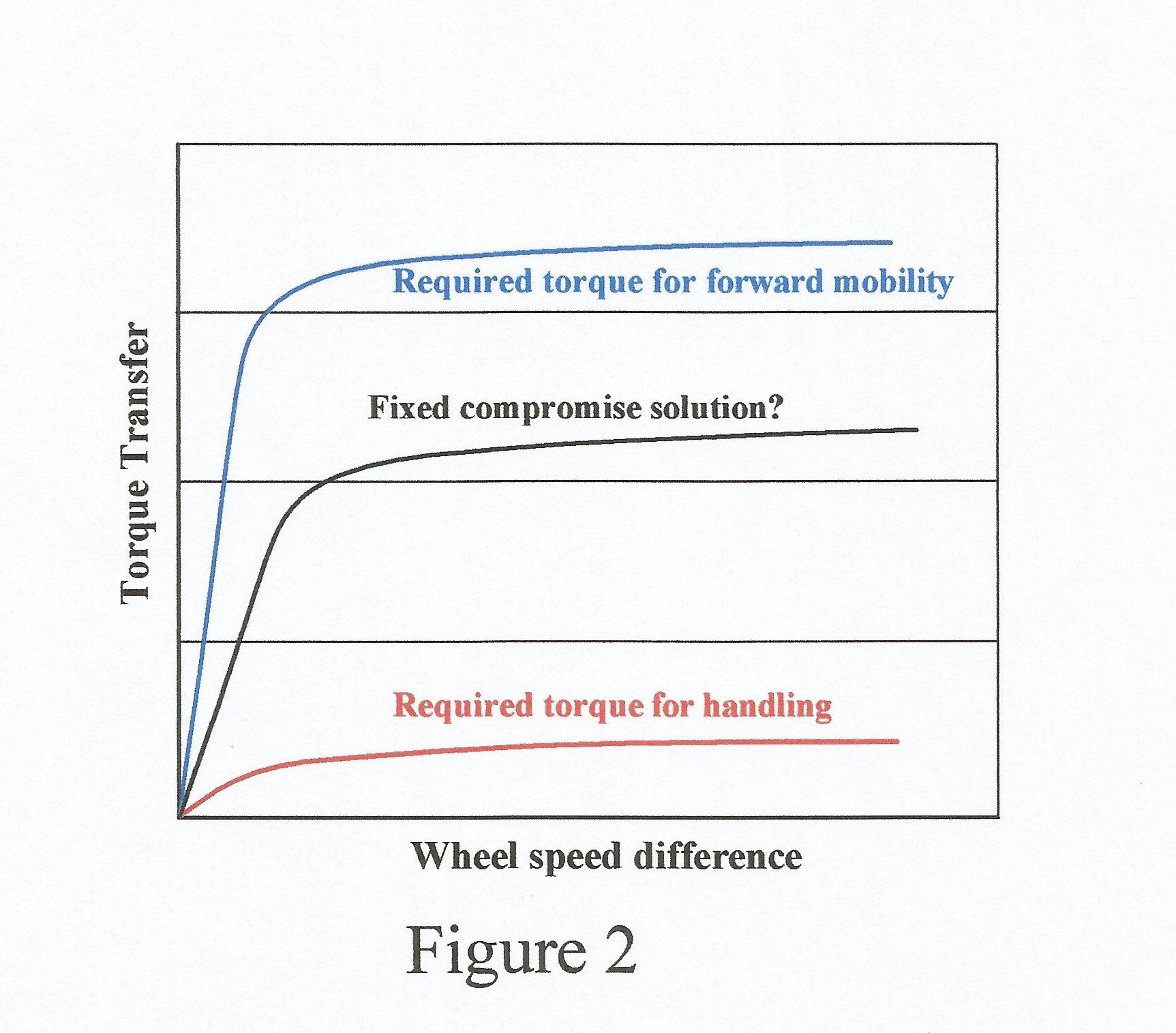 Fig. 2 - Torque transfer for a speed-sensitive LSD
Fig. 2 - Torque transfer for a speed-sensitive LSD
Written by John Coxon
4529