Flexray - science fiction or fact?
 I have never been a great lover of science fiction. The daring antics of comic book heroes such as Buck Rogers or Flash Gordon, or any of their later brethren, have never gripped me. Dashing around slaying the baddies using some form of ray gun was, I thought, rather too fanciful, and even from a tender age sounded too far-fetched and wholly impractical to me. So when I first heard about Flexray it sounded more akin to my comic book past than any serious technology in the modern world. But how wrong I was - you see, it's all to do with the limits of CANbus.
I have never been a great lover of science fiction. The daring antics of comic book heroes such as Buck Rogers or Flash Gordon, or any of their later brethren, have never gripped me. Dashing around slaying the baddies using some form of ray gun was, I thought, rather too fanciful, and even from a tender age sounded too far-fetched and wholly impractical to me. So when I first heard about Flexray it sounded more akin to my comic book past than any serious technology in the modern world. But how wrong I was - you see, it's all to do with the limits of CANbus.
The CAN (Controller Area Network) bus is effectively a pair of twisted wires, one carrying a 'high' voltage and the other a 'low' voltage, which transmit a series of digital messages according to a given protocol. By connecting sensors, actuators and their controlling devices (ECUs) with messages loaded and downloaded at various 'nodes' along the way, what were once bulky vehicle electric harnesses have been reduced to but a single cable.
First defined in 1984 by component supplier Robert Bosch, and incorporated into ISO standard 11898 in 1994, since the mid-2000s CANbus has been fitted to just about every new passenger car, providing a single conduit for data transfer across the vehicle. The problem is that with a maximum transmission rate typically of the order of 1 Mbit/s, there is only so much information it can carry. Using a system whereby the priority of the message varies according to a designation given once the bus is operating above around 35% of its overall capacity, statistically there is no guarantee that the signal will be received at its destination in a timely manner if other, higher priority data is in the way.
A simple analogy is that of a car joining a busy road at a 'T' junction. The car can only access the busy road at a given time when there is space for it. If there is no space then any request to join the carriageway will be denied, and repeated requests ignored until there is either space or an approaching car (message) with a lower priority.
For time-sensitive control data (as in a powertrain) clearly this is a worry since the data about, for instance, an ignition timing pulse on an engine running at high speed needs to be delivered precisely at the optimum time, not five or even ten crankshaft degrees later. Of course, where a lot of time-sensitive data is used, multiple CANbus systems can be (and are) most helpful and, linked together, offer what many control engineers might say is an inexpensive if not very elegant solution.
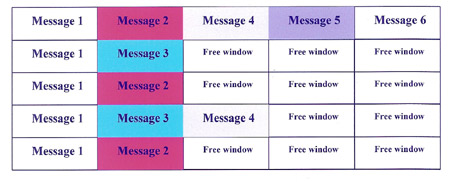
A much better approach is Flexray. Described as a "time-deterministic protocol for X-by-wire applications", Flexray typically operates at up to ten times the speed of the fastest CANbus and, because of that, the data messages can be time triggered within a matrix according to their frequency and urgency.
It may not be as swashbuckling as Buck Rogers or capture the imagination as Flash Gordon does - for some people at least - but in the next five to ten years Flexray, as science fact, will surely make its presence felt in more ways than we can even guess at the moment.
Fig. 1 - Time-triggered network principles
Written by John Coxon
3225