Vehicle launch control systems
One of the greatest challenges to a racing driver is that of the standing start away from the grid. At a time when places can be won or lost in a fraction of a second, the ability to match the engine torque to the maximum tractive effort between tyre and track is a great skill. Made even more difficult by the ‘peaky’ nature of the engine’s power delivery, the trick of balancing the clutch position against the throttle opening for best getaway is difficult enough to achieve once, and to do it repeatedly to the same level is barely possible. But while some drivers are very good, none can achieve the optimum of an electronic launch control system.
The force transmitted by the vehicle tyre to the ground is limited by a number of factors, but principally by vehicle corner weight and the amount of weight transferred as a result of vehicle dynamics. Tangential to this force at the contact with the ground is the tractive force, which in the static case of a given vehicle-tyre combination is a fixed constant but which will increase as the tyre under power begins to lose traction and begin to slip. Generally referred to as the ‘slip ratio’ – the ratio of the speed of slip to that of the driven wheel – this coefficient increases up to a point, after which it falls away again, as shown in Fig. 1. Highly dependent on the tyre, its temperature and the surface upon which the car is running, this best relative slip speed for a given tyre/surface is somewhere around 10-15%. The role of a vehicle launch system therefore is to assist the driver in maintaining this level of tyre slip without exceeding it and without overspeeding the engine.
Generally included as part of the traction control system on many aftermarket engine management systems, at their simplest level they will need to incorporate a method of determining tyre slip, a sensor in the clutch-actuating mechanism and a method of initiating the system at the start line. Inputs to the algorithm necessary to control this most basic of system are therefore wheel speeds, throttle position, clutch position and engine speed. Tyre slip is readily calculated using wheel speed inputs from a non-driven wheel (usually a front wheel or the average of the two front wheels) and that of the driven wheel or wheels.
On a command to activate the system (a simple on-off switch) as the clutch is depressed, the driver will then open the throttle until the engine reaches the desired engine launch speed. This will most likely be a ‘soft’ speed limit beyond which the fuel to one or more cylinders would be cut. As a safeguard, at around 250 rpm higher, a ‘hard’ rev limit will be set, beyond which the engine will not go.
Held at this condition in readiness for the start, in the case of a turbocharged engine this could be for a couple of seconds while the boost pressure builds up. Once the engine speed has stabilised (along with the boost pressure if needed), on re-engaging the clutch and with the vehicle beginning to move, the system will cut in until the desired level of slip is created. By now, at full throttle, the system will modulate the fuel to the cylinders until the point where second gear is requested.
At this point it must be noted that with such a simple system there is no control over the clutch or its speed of engagement other than by the driver. It is assumed that for this part of the process the clutch will be either ‘in’ or ‘out’ and that the driver, through skill and/or experience, will be able to operate this without the engine stalling or ‘bogging down’. To have a fully automatic launch control system and therefore the possibility of a two-pedal (brake and throttle) driving layout will need additional sensors, an actuator and a clutch control system controlling engine speed and clutch position at optimum tyre slip.
Launch control systems may be effective and may, it is argued, make the first few seconds of the race marginally safer. However, as a bit of a purist, from the point of view of the sport I do feel it downgrades the skills of the driver.
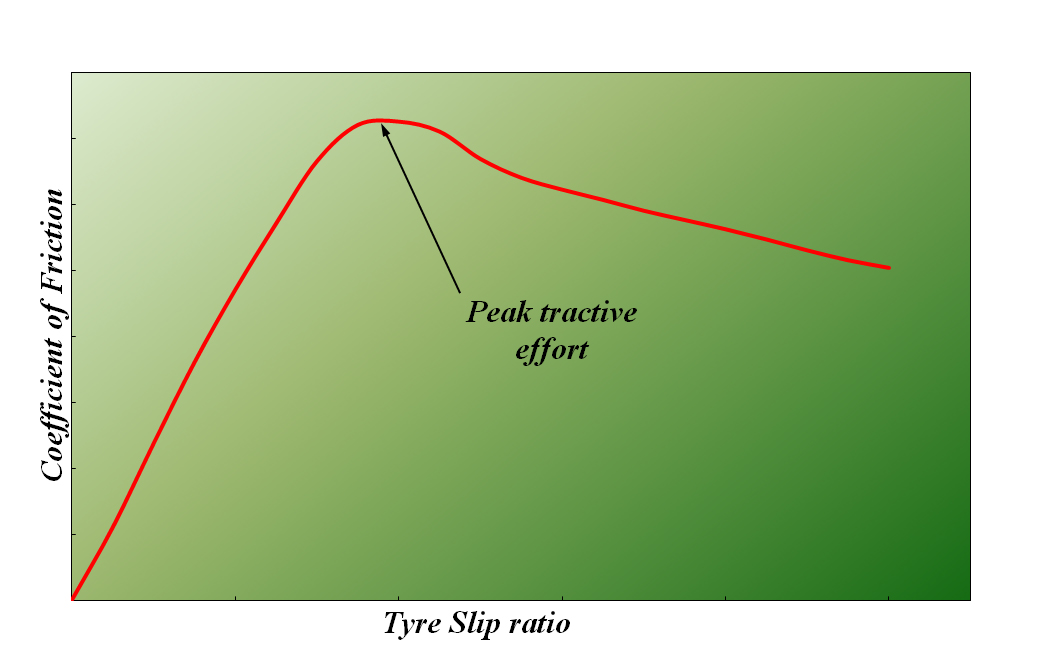 Fig. 1 - Friction as a function of tyre slip
Fig. 1 - Friction as a function of tyre slip
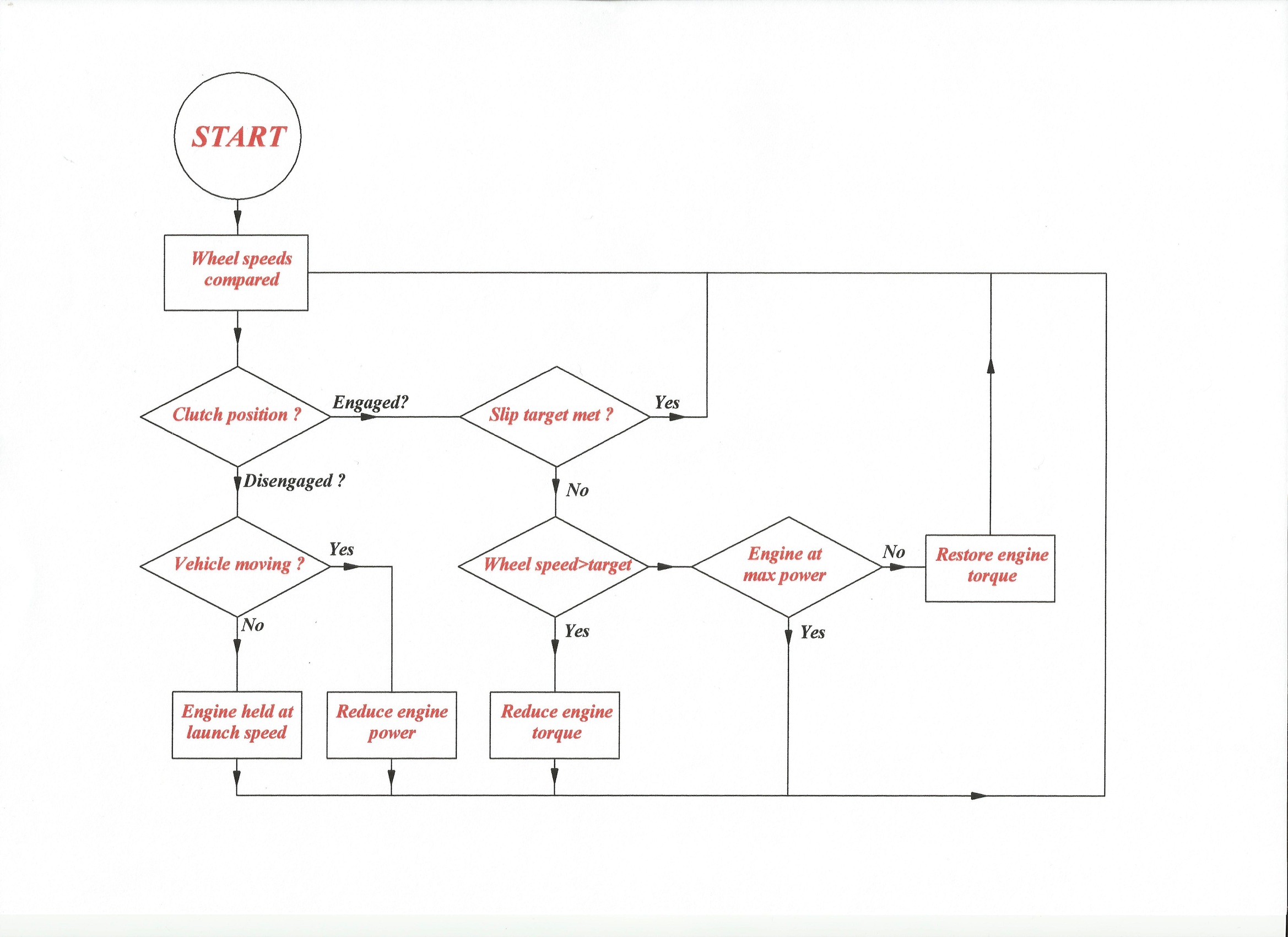 Fig. 2 - A simple launch control flow chart
Fig. 2 - A simple launch control flow chart
Written by John Coxon
7745