Multiplexing
I remember the first time I came across the term ‘multiplexing’. It was in the early 1980s when I was working at an engineering company, and we were looking to save weight in the door of a luxury vehicle. At the time, electrical or electronic components on vehicles were not as common as they are now, but those that were needed copious amounts of electrical wiring in order to operate them. This was heavy, expensive and unreliable. The object therefore was to replace all the wiring associated with the new-fangled electric windows, locks and mirrors with a single wire and save on cost and weight.
At the time we didn’t fully appreciate the reliability bit, but anyone who owns a classic vehicle from the period will know how thick and heavy many of the wiring looms were. Little did we realise at the time how important the concept of multiplexing would become, and how just about every single vehicle (including race vehicles) made in the 21st century would rely on the technology.
These days of course, more and more electrical/electronic functions are being put into the car, most of which require some form of control and many of which require some form of local intelligence. One of the earliest protocols devised to transfer serial data between systems is known as CAN (Controller Area Network) or more exactly, the CAN bus, and it is still the most popular. Essentially it is a pair of twisted wires replacing up to 100 or more ‘normal’ wires, with control devices connected in a daisy-chain fashion.
Designed to handle short messages up to 8 bytes in length at rates of up to 1 Mbit/s, the protocol uses a method known as Carrier Sense Multiple Access (CSMA) to transmit the data frames, allowing each control unit or node in the system to transmit the data in frames at any time. The data will include a node address to which the message is to be delivered (a sort of mail post or zip code) as well as the message itself. Passed between nodes in turn, if the postcode does not match that of the node then the message is simply ignored and passed on. Should two or more messages be sent at the same time, a collision will be detected and the message with a higher priority indicator will continue, with the one of lower priority repeated later.
Although satisfactory for most powertrain applications, for x-by-wire safety-critical systems –braking and throttle – another and more powerful system is being touted. Known as FlexRay and similar to CAN, this system is faster (up to 10 Mbit/s) and can handle up to 254 bytes of data in a frame. Wired in much the same way as CAN, FlexRay can be configured if desired to support two separate cable paths, giving the opportunity to transmit the same, repeated data to provide safety-critical redundancy in the system or a completely new set of data to increase the overall throughput should better control be desired.
Whereas with CAN frames vary in length, for FlexRay the frames are split into two, with the first portion the same for all. Since these occur at well defined times in the message they can be used to synchronise the execution of the message in the multiple control units at the individual nodes. Referred to as Time Division Multiple Access (TDMA), each frame is assigned a dedicated time slot in the signal, and since no two frames are assigned the same slot in time, collisions between messages are impossible.
Currently more expensive than CAN, FlexRay’s supporters claim that with wider adoption, prices will fall. But as brake-by-wire systems become more integrated, particularly into regenerative hybrid applications, perhaps this technology will be a better option than just CAN.
And for our door application? Well, designed as a low-cost option for applications not requiring the same degree of control, we have LIN – Local Interactive Network. But that’s another story.
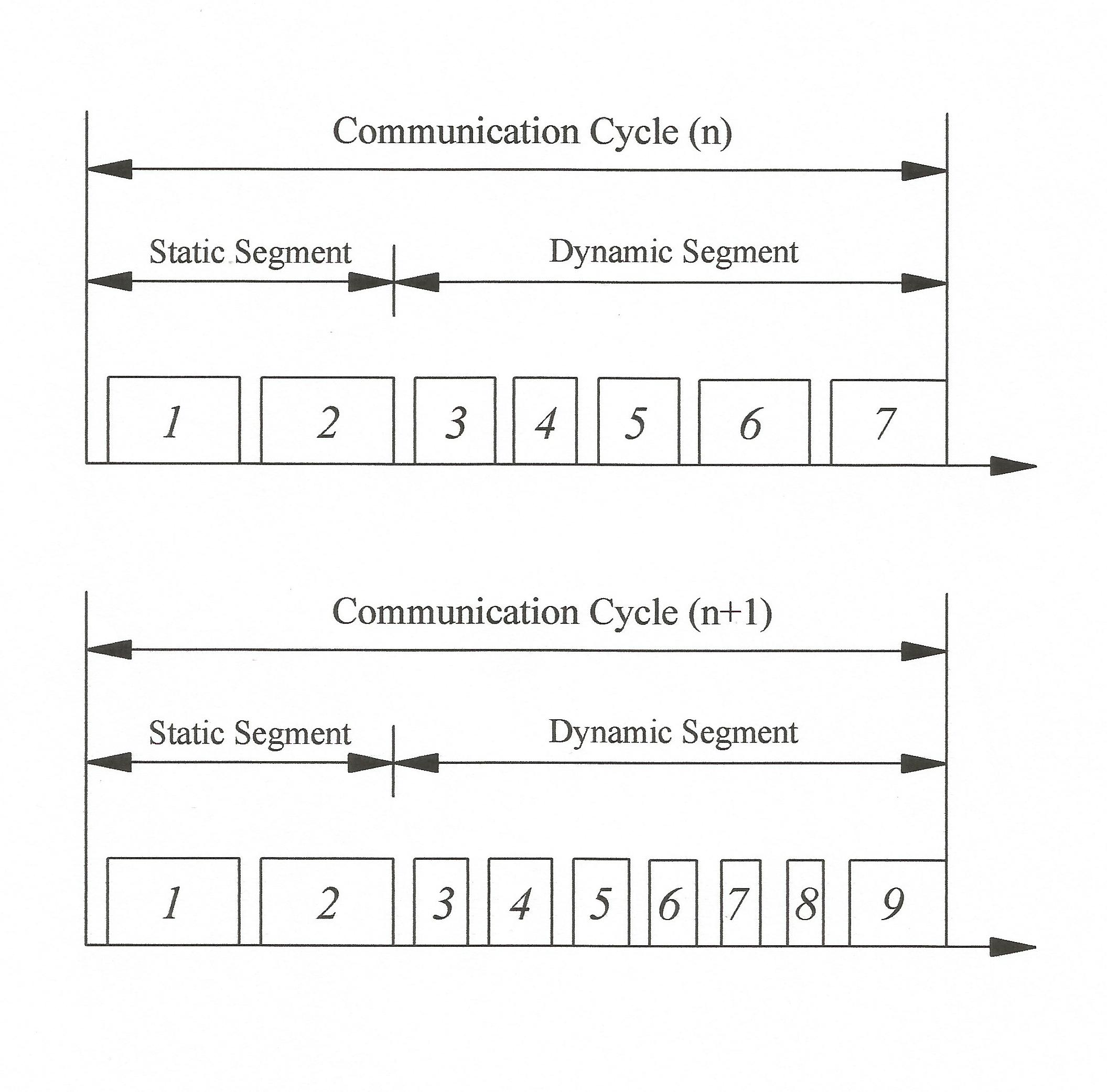 Fig. 1 - The fixed-length FlexRay message
Fig. 1 - The fixed-length FlexRay message
Written by John Coxon
6444